Success-Plan Services
Success-Plan ServicesIntroduction
A set of generators and utilities to make ROS 2 applications more productive with comprehensive capabilities of RTI Connext Drive
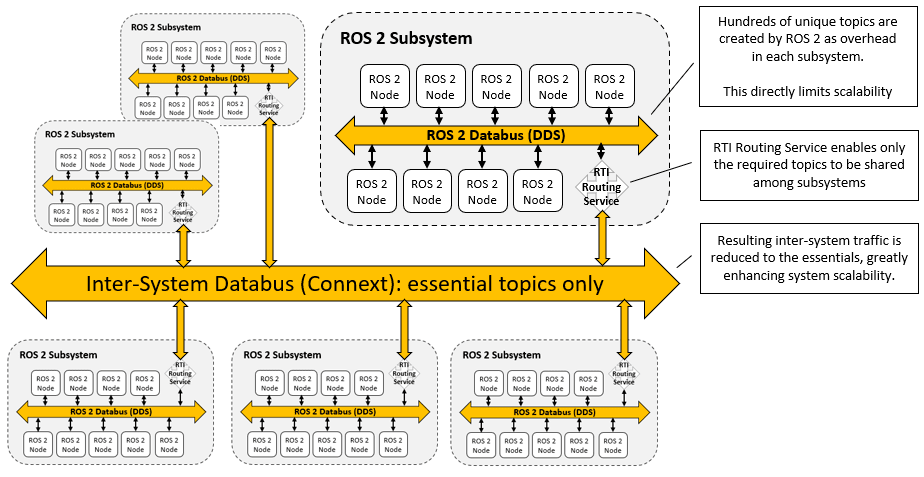
ROS 2 (Robot Operating System version 2) is a framework for creating robotics systems and applications. The design of ROS 2 is well suited for research and education, through a familiar platform which makes it very easy to construct working systems. These same characteristics, however, can become barriers to creating high-performance, scalable systems that are suitable for the kinds of mission- and safety-critical systems at high production volumes, which Connext Drive is uniquely suited to build and run.
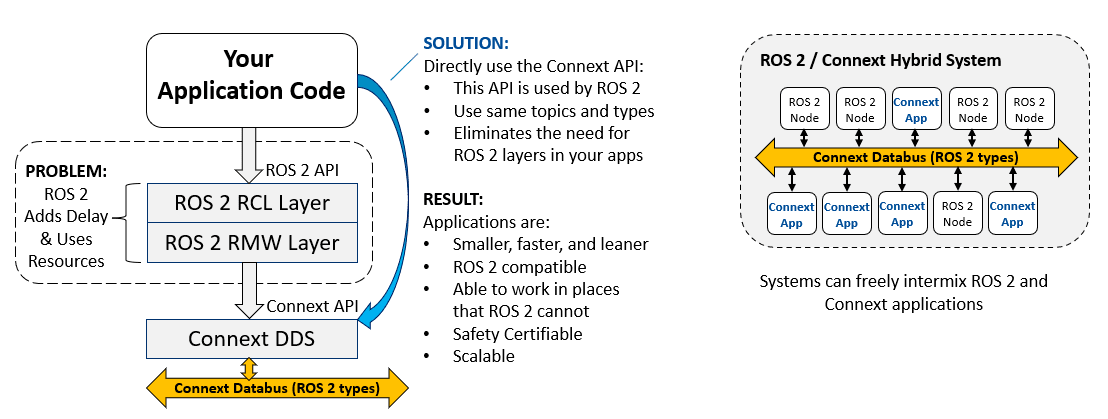
Since ROS 2 is built on the DDSTM standard, it is fully interoperable with systems built on Connext Drive (also based on the DDS standard) and the rich Connext Drive ecosystem of services, utilities, and integrations. The Connext Integration Toolkit for ROS 2 (Toolkit) enables systems built on ROS 2 to take full advantage of Connext Drive and its ecosystem, in order to quickly resolve problems of scalability, performance, and operation in the most demanding environments, while retaining the use of familiar ROS 2 tools and packages.